Motivation
3D卷积神经网络在医疗影像中很成功,但是选择或设计一个合理的网络结构是非常耗时的。
由于内存限制和较大的搜索空间,NAS算法经常存在搜索阶段和部署阶段之间不一致,3D医学图像中更加消耗内存和时间,这种情况更加严重。
Neural Architecture Search(NAS)提出以来,通常是在较浅的网络中进行搜索,同时在更深层次进行部署。
本文贡献
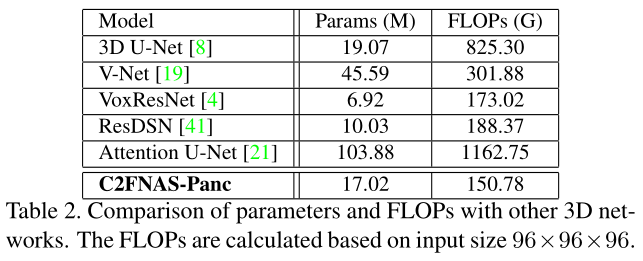
- 本文从头开始搜索3D分割网络,不牺牲网络大小或输入大小
- 基于医学图像分割先验,为每个阶段设计了特定的搜索空间和搜索方法
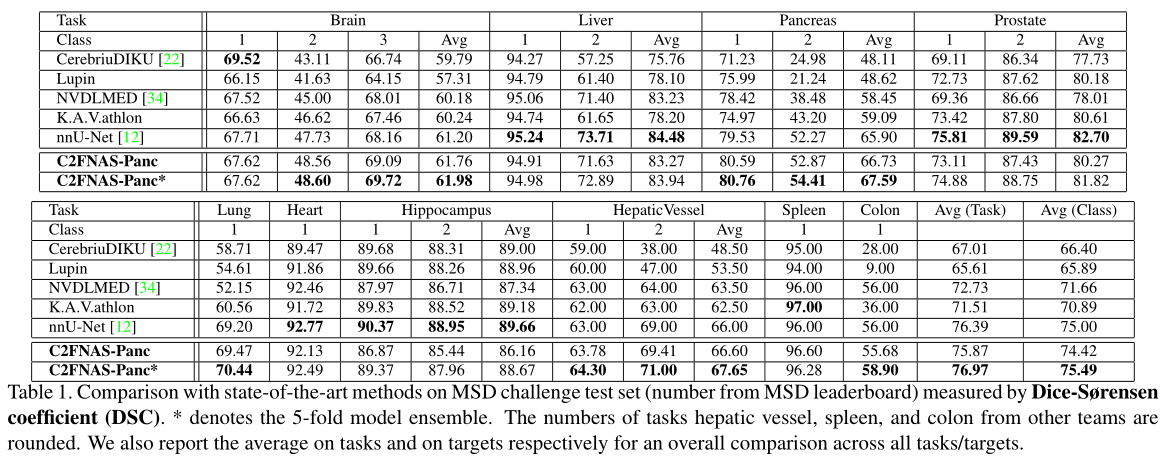
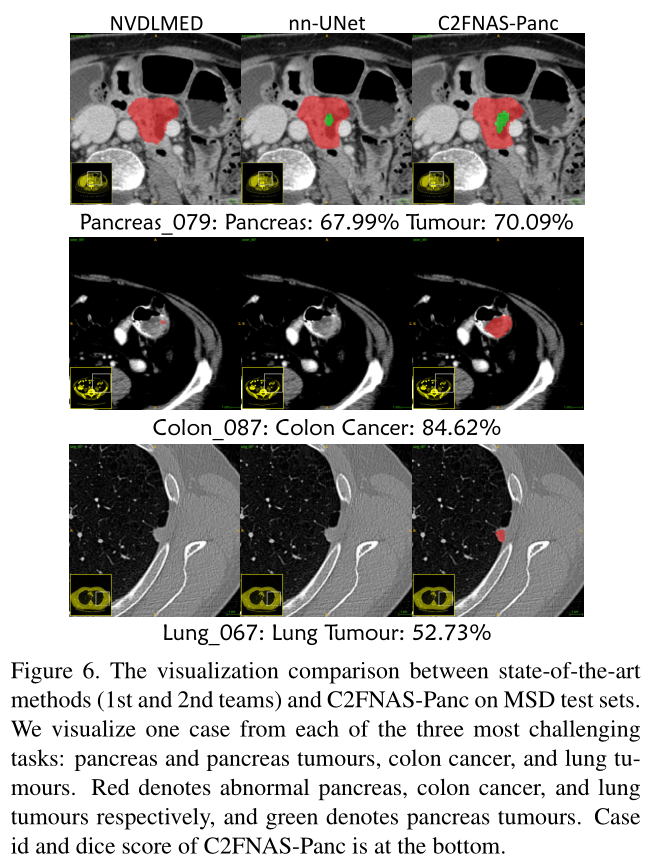
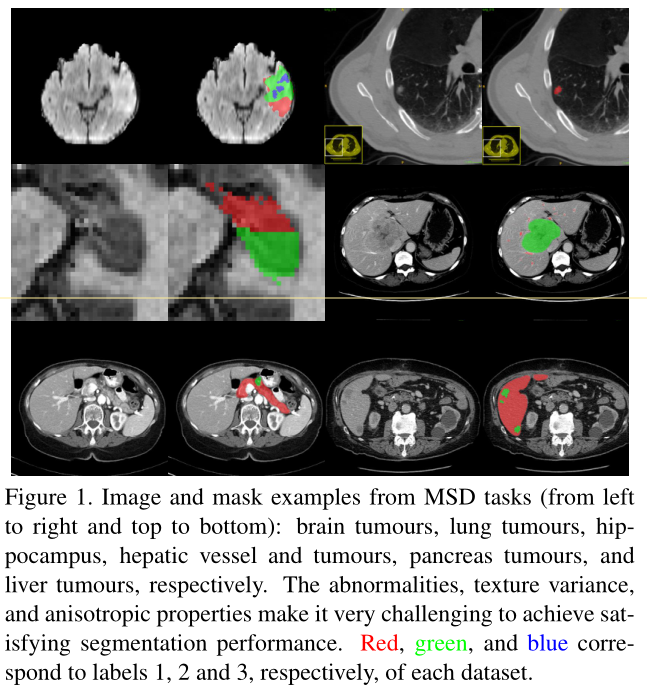
- 本文模型在MSD挑战的10个数据集上达到了state-of-the-art性能,以及强大的鲁棒性和迁移能力
Methods
Coarse-to-fine Neural Architecture Search
为了避免搜索阶段和部署阶段之间网络大小和输入大小的不一致,本文提出了用于3D医学图像分割的从粗到精的神经体系结构搜索方案。
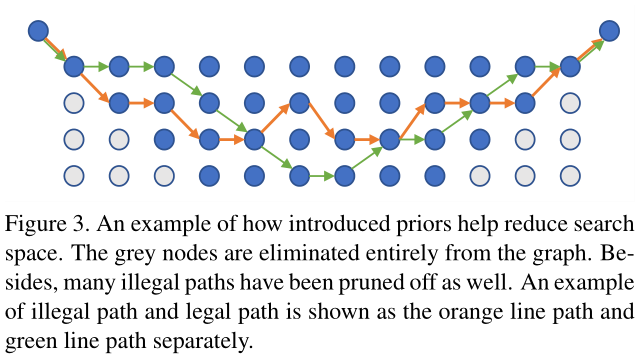
为了减少搜索空间,采用了两种先验:
- U形的Encoder-Decoder结构
- 降采样和升采样之间使用skip-connections

搜索空间\(A\)分为两部分:较小的拓扑结构搜索空间\(S\)和巨大的操作搜索空间\(C\): \[ A=S \times C \]
本文方法看作构建一个彩色的有向无环图(DAG)的过程,整个过程分为两个阶段:
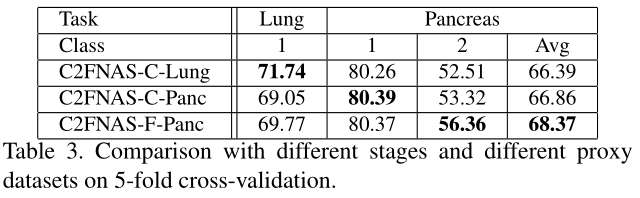
- Coarse stage: 搜索宏观的网络结构
- Fine stage: 为每个节点搜索最好的操作
Coarse Stage: Macro-level Search
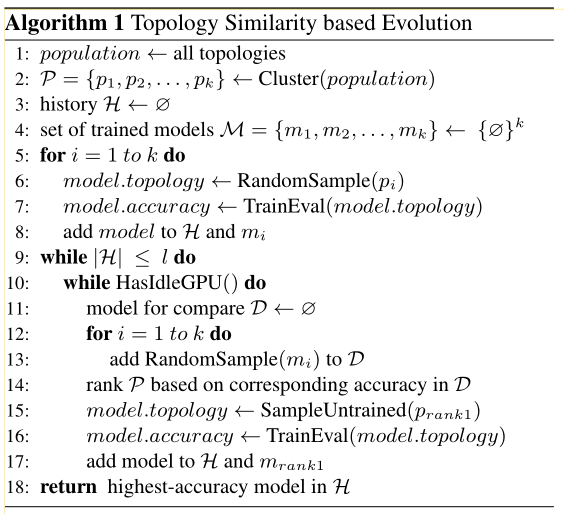
该阶段主要集中于搜索网络的拓扑结构。
Fine Stage: Micro-level Search
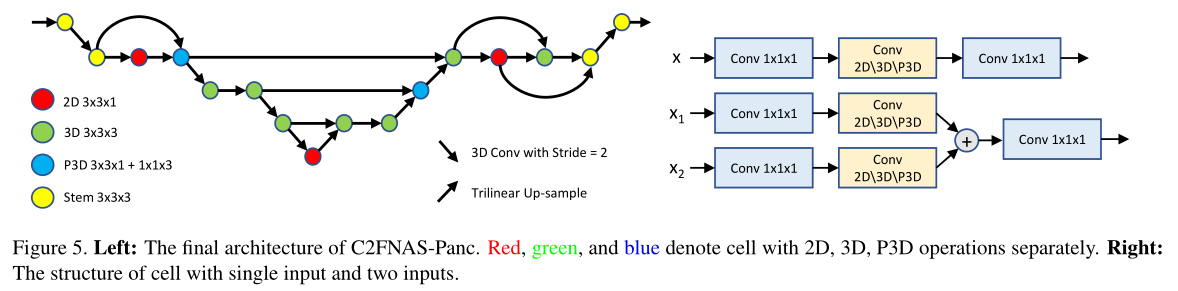
卷积操作的搜索空间主要有三种:
- \(3 \times 3 \times 3\) 3D 卷积操作
- \(3 \times 3 \times 1\)后紧接\(1 \times 1 \times 3\) P3D卷积
- \(3 \times 3 \times 1\) 2D 卷积操作
为了在提高搜索效率的同时解决内存限制的问题,我们采用具有统一采样[10]的单路径单发NAS作为我们的搜索方法。
Experiments
最终的网络结构如图所示,每一个卷积操作前加一个\(1 \times 1 \times 1\)卷积操作进行图像预处理。